이더리움은 2015년 출시된 이후 암호화폐 세계에서 비트코인 다음으로 중요한 위치를 차지하고 있는 혁신적인 블록체인 플랫폼입니다12. 단순한 디지털 화폐를 넘어 스마트 계약과 탈중앙화 애플리케이션을 실행할 수 있는 분산 컴퓨팅 플랫폼으로서, 전 세계 개발자들이 다양한 블록체인 기반 서비스를 구축할 수 있는 기반을 제공하고 있습니다34.

The official logo of Ethereum, featuring its distinctive geometric design pixabay
이더리움의 역사와 발전
창시자와 초기 비전
이더리움은 1994년 러시아 출생의 천재 프로그래머 비탈릭 부테린(Vitalik Buterin)에 의해 구상되었습니다56. 당시 19세였던 부테린은 2013년 비트코인의 제한적인 스크립팅 기능에 실망하며, 더욱 범용적인 블록체인 플랫폼의 필요성을 느꼈습니다75. 그는 블록체인 기술이 단순한 화폐 거래를 넘어 다양한 애플리케이션을 지원할 수 있는 “월드 컴퓨터”가 될 수 있다고 비전을 제시했습니다23.

Vitalik Buterin, co-founder of Ethereum wikipedia
주요 발전 단계
이더리움의 발전 과정은 여러 중요한 이정표를 통해 이루어졌습니다87. 2014년 크라우드세일을 통해 약 1,800만 달러의 개발 자금을 모금한 후, 2015년 7월 30일 첫 번째 버전인 ‘프론티어(Frontier)’가 출시되었습니다98. 이후 2016년 홈스테드(Homestead) 업그레이드가 진행되었으나, 같은 해 DAO 해킹 사건으로 인해 하드포크가 실시되어 이더리움과 이더리움 클래식으로 분리되는 중대한 전환점을 맞았습니다27.
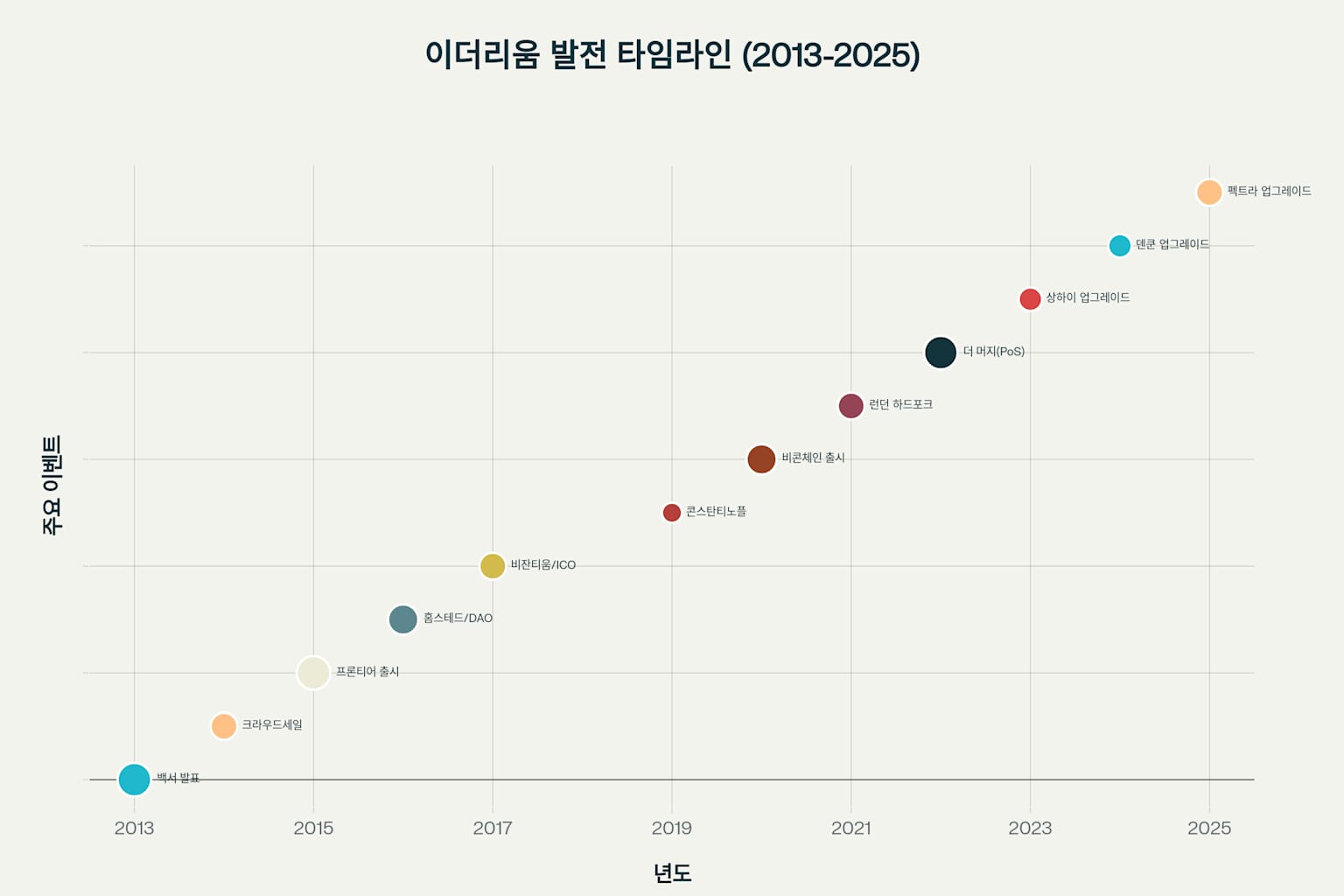
이더리움의 주요 발전 단계를 시간순으로 보여주는 타임라인
2017년에는 비잔티움(Byzantium) 업그레이드와 함께 ICO 붐이 일어나며 이더리움의 대중적 인지도가 크게 상승했습니다710. 2020년 이더리움 2.0의 첫 단계인 비콘체인이 출시되었고, 2022년 9월 ‘더 머지(The Merge)’를 통해 작업증명(PoW)에서 지분증명(PoS)으로의 역사적 전환을 완료했습니다1112.
핵심 기술과 특징
이더리움 가상 머신(EVM)
이더리움의 가장 핵심적인 기술 요소는 이더리움 가상 머신(EVM)입니다1314. EVM은 튜링 완전한 가상 머신으로서 스마트 계약을 실행하고 네트워크의 상태 전환을 관리하는 역할을 담당합니다1315. 모든 이더리움 노드에서 동일하게 실행되어 네트워크의 일관성을 보장하며, 솔리디티(Solidity) 언어로 작성된 스마트 계약을 바이트 코드로 컴파일하여 실행합니다1514.
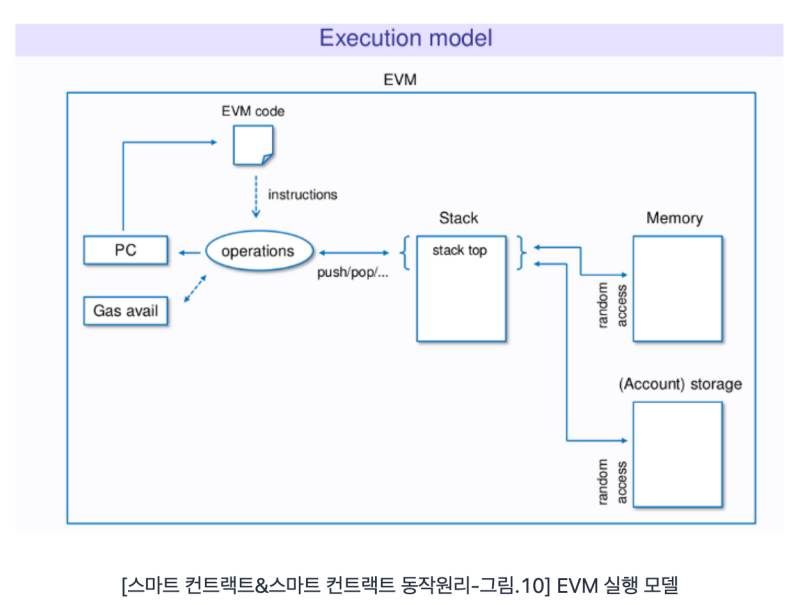
Diagram illustrating the Ethereum Virtual Machine (EVM) execution model for smart contracts naver
노드 아키텍처와 네트워크 구조
현재 이더리움은 이중 클라이언트 아키텍처를 사용하여 합의 클라이언트와 실행 클라이언트가 분리되어 작동합니다161. 합의 클라이언트는 지분증명 합의 알고리즘을 처리하고, 실행 클라이언트는 거래 처리와 EVM 실행을 담당합니다1612. 이러한 분리된 구조는 네트워크의 모듈성을 높이고 각 구성 요소의 독립적인 개발과 최적화를 가능하게 합니다12.
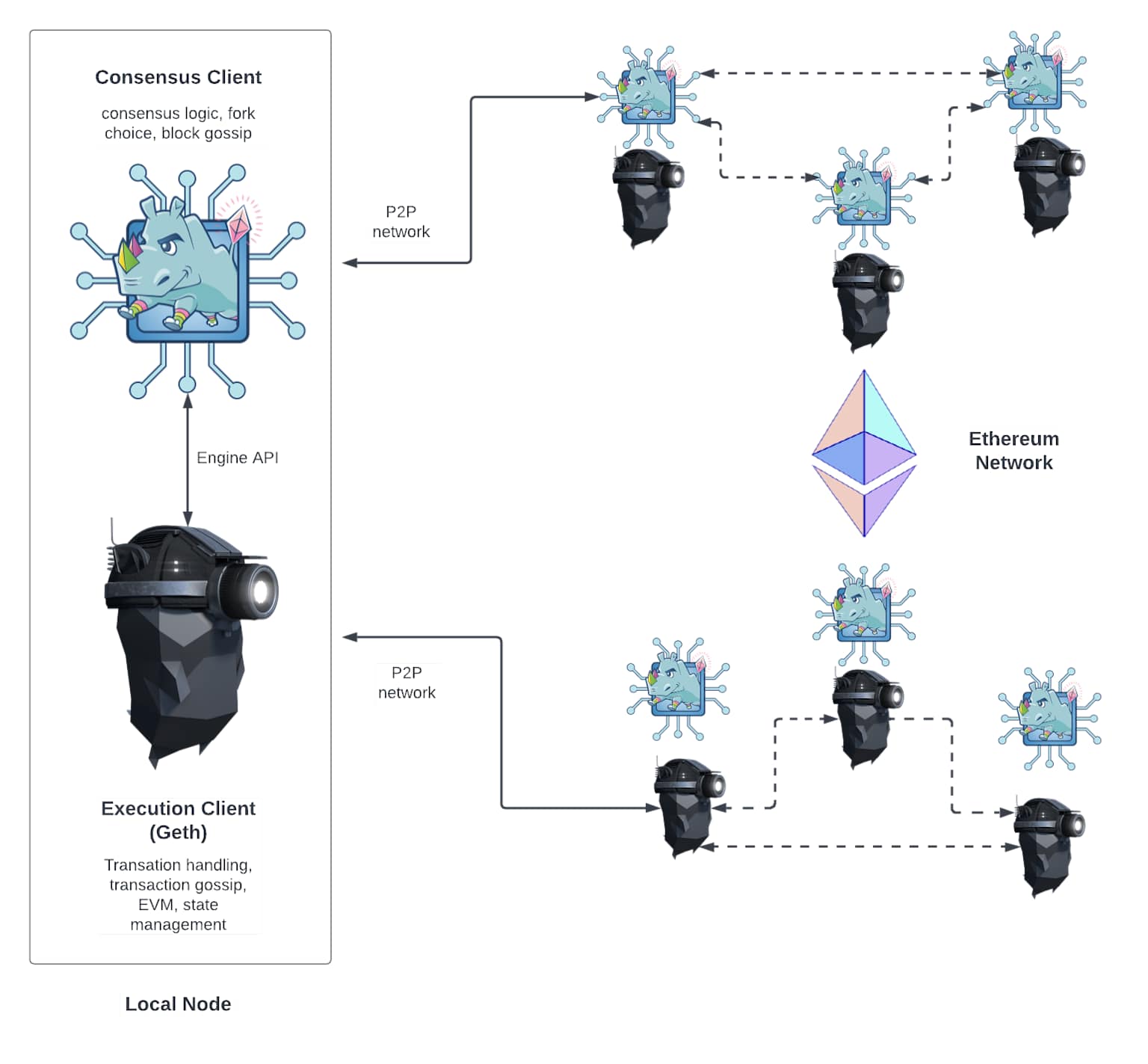
Diagram illustrating the Ethereum node architecture, showing how Consensus and Execution clients interact and form the distributed network tistory
블록 생성과 데이터 구조
이더리움의 블록 생성 과정은 메모리풀에서 거래를 수집하여 EVM을 통해 처리한 후 네트워크 승인을 거쳐 블록체인에 추가되는 6단계 과정을 거칩니다5. 각 블록은 이전 블록의 해시, 거래 루트, 상태 루트, 영수증 루트 등을 포함하는 복잡한 데이터 구조를 가지고 있으며, 머클 트리를 통해 데이터의 무결성을 보장합니다17.
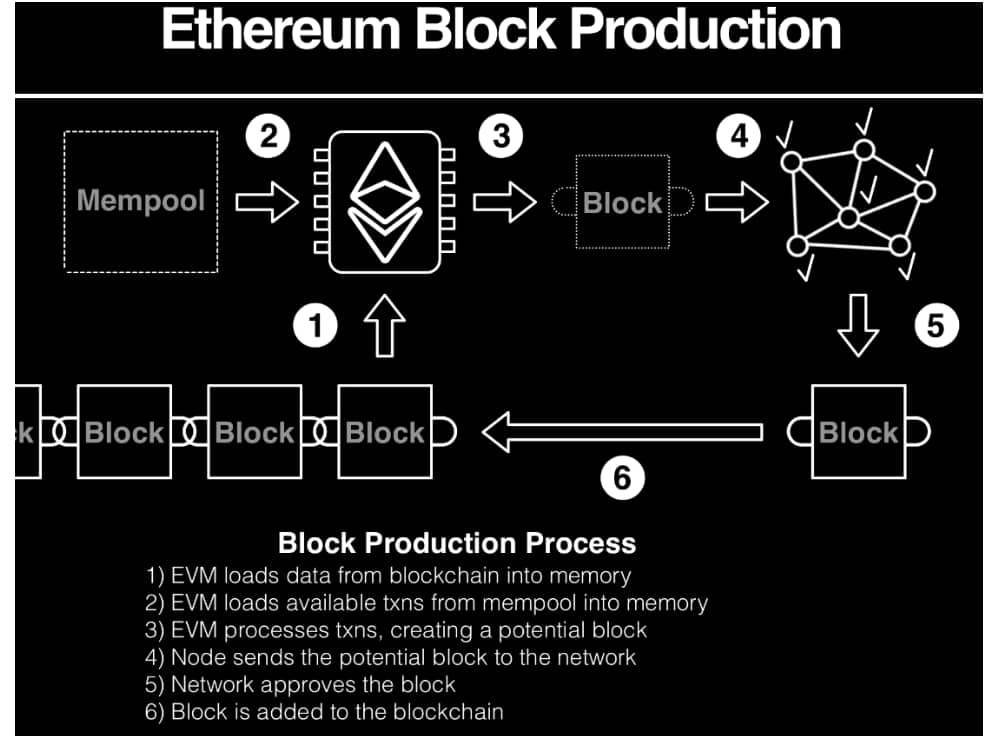
Diagram illustrating the six-step Ethereum block production process, from transaction processing by the EVM to block approval and addition to the blockchain everdu
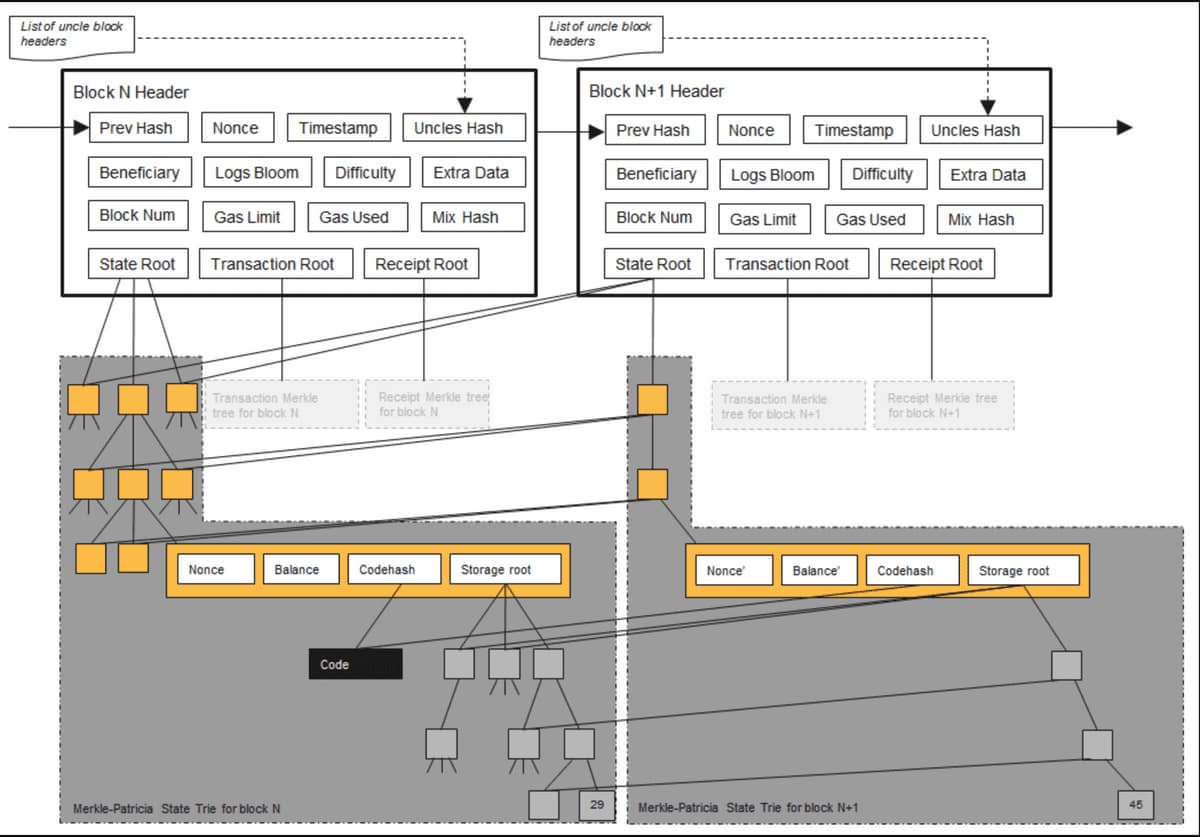
Detailed diagram illustrating the components of an Ethereum block header and its associated Merkle trees for transactions, receipts, and state devkly
스마트 계약과 가스 시스템
스마트 계약은 이더리움의 핵심 혁신으로, 미리 정의된 조건이 충족되면 자동으로 실행되는 프로그래밍 가능한 계약입니다1513. 모든 스마트 계약 실행에는 ‘가스(Gas)’라는 연산 수수료가 필요하며, 이는 네트워크 남용을 방지하고 검증자에게 보상을 제공하는 역할을 합니다181. 가스 수수료는 네트워크 수요에 따라 변동되며, 2021년 런던 하드포크 이후 EIP-1559에 의해 기본 수수료 소각 메커니즘이 도입되었습니다1719.
이더리움 생태계
이더리움 생태계는 다양한 분야에서 혁신적인 애플리케이션들이 구축되어 현재 블록체인 산업의 중심축 역할을 하고 있습니다2010. DeFi(탈중앙화 금융)가 전체 생태계의 35%를 차지하며 가장 큰 비중을 차지하고 있고, NFT가 20%, 게임과 메타버스가 15%의 비중을 보이고 있습니다1021.
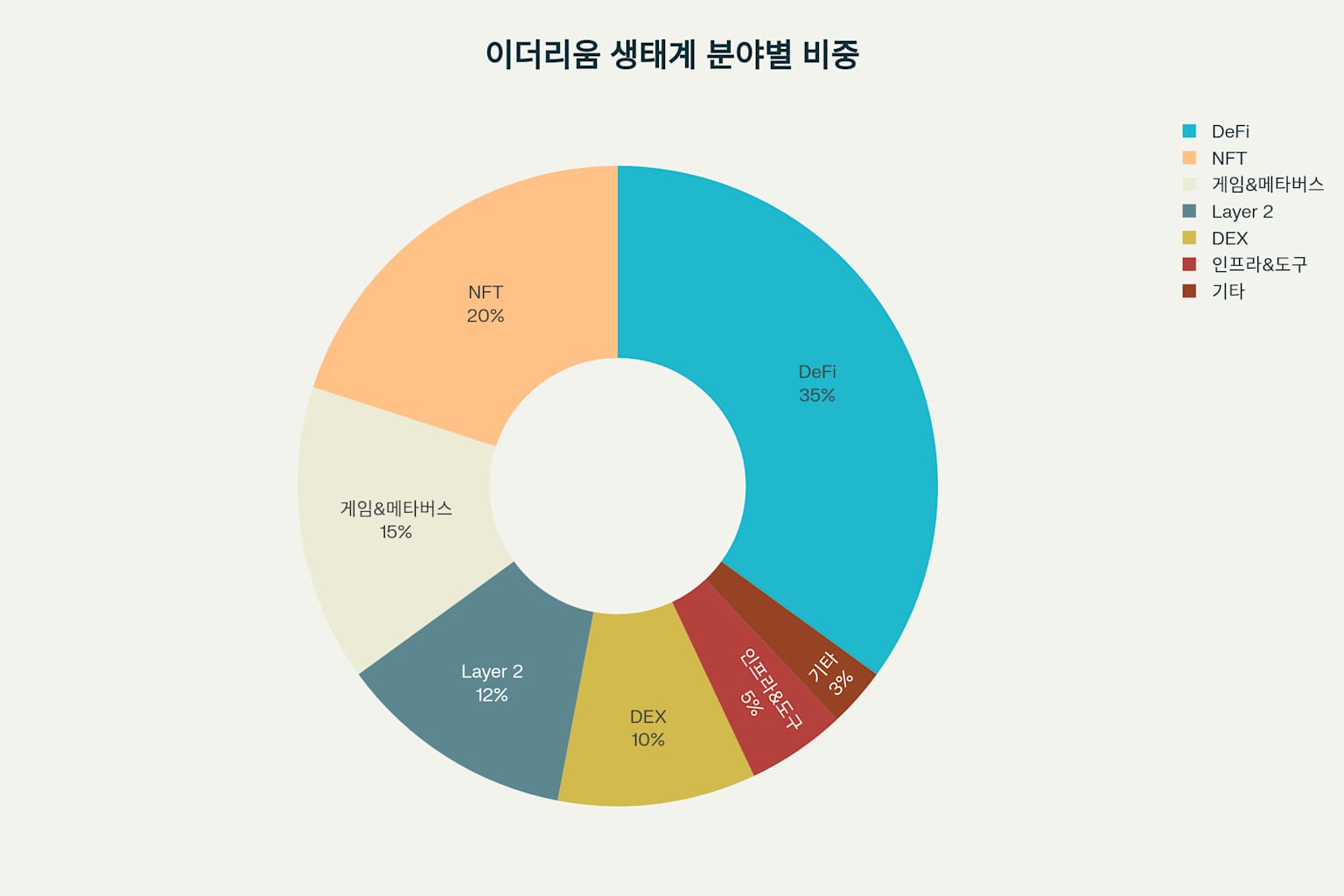
이더리움 생태계 내 주요 애플리케이션 분야별 활용도 비중
탈중앙화 금융(DeFi)
DeFi는 이더리움 생태계의 가장 중요한 사용 사례로, 현존하는 DeFi 프로젝트의 80% 이상이 이더리움에서 구동되고 있습니다10. Compound, Aave, UniSwap, MakerDAO 등 주요 DeFi 플랫폼들이 이더리움의 스마트 계약 기능을 활용하여 대출, 거래, 유동성 공급 등의 금융 서비스를 제공하고 있습니다110. 이러한 프로토콜들은 중개기관 없이도 안전하고 투명한 금융 거래를 가능하게 하여 전통 금융 시스템에 대한 혁신적 대안을 제시하고 있습니다10.
NFT와 디지털 자산
NFT(대체불가토큰) 시장은 이더리움의 또 다른 핵심 활용 분야로, 디지털 아트, 게임 아이템, 수집품 등 다양한 형태의 디지털 자산의 소유권을 블록체인상에서 증명할 수 있게 해줍니다121. CryptoKitties가 최초의 NFT 프로젝트로 시작된 이후, 현재는 OpenSea 등의 NFT 마켓플레이스를 통해 수십억 달러 규모의 거래가 이루어지고 있습니다122.
레이어 2 솔루션과 확장성
이더리움의 확장성 문제를 해결하기 위해 다양한 레이어 2 솔루션들이 개발되어 생태계의 12%를 차지하고 있습니다2023. Arbitrum, Optimism, Polygon 등의 레이어 2 네트워크들은 메인넷의 보안성을 유지하면서도 더 빠르고 저렴한 거래를 가능하게 하여 이더리움 생태계의 중심적 역할을 계속 수행하고 있습니다23.
경제적 측면과 시장 동향
현재 시장 지위
이더리움은 시가총액 기준으로 비트코인 다음인 2위를 차지하며, 2025년 5월 기준 약 2,200억 달러의 시가총액을 기록하고 있습니다424. 그러나 최근 전체 암호화폐 시장에서 이더리움의 점유율은 4년 만에 최저치인 7% 선으로 떨어지며 경쟁 심화에 직면해 있습니다2526.
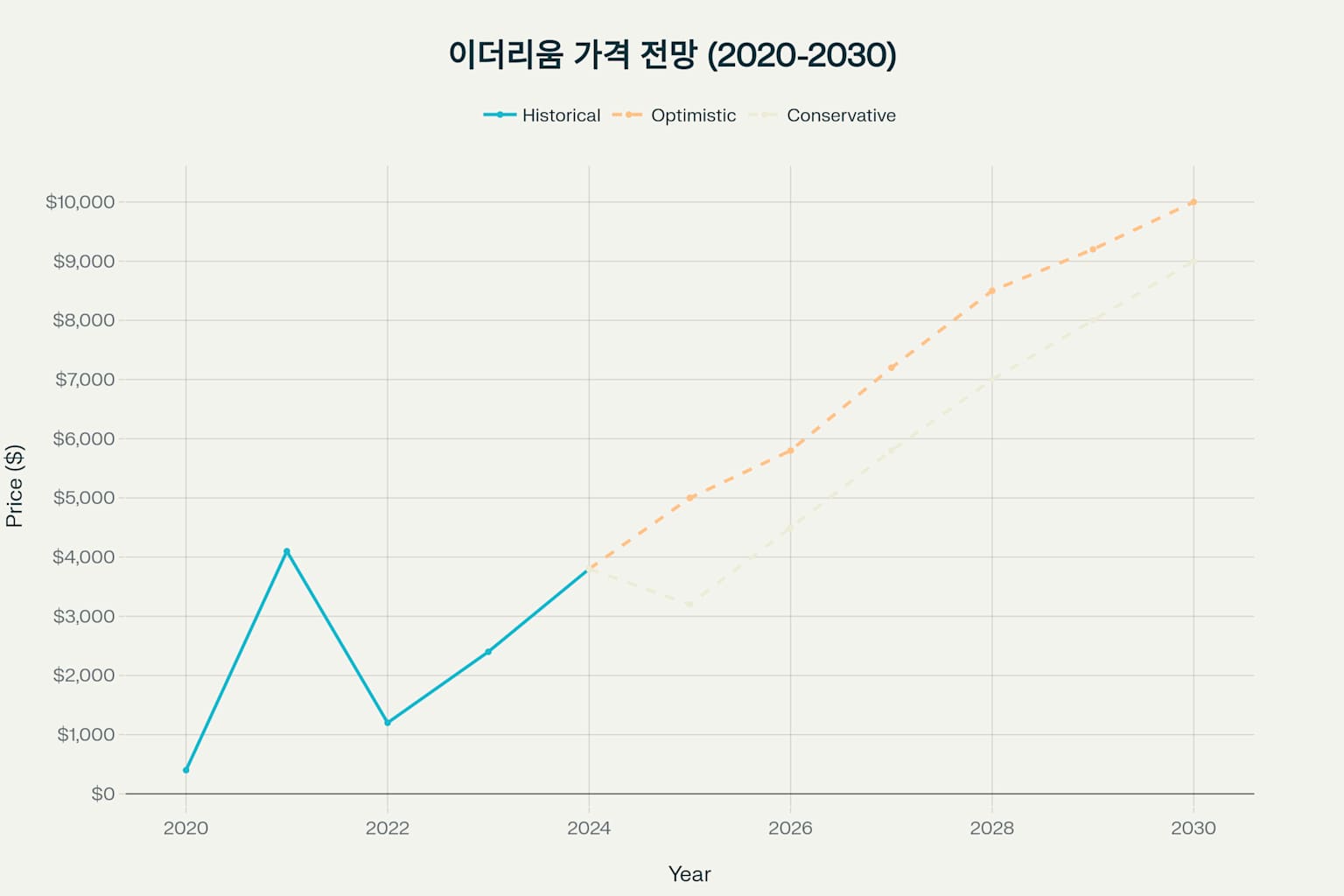
이더리움의 과거 가격 추이와 미래 전망 시나리오 비교
가격 전망과 투자 관점
전문가들은 2025년 이더리움 가격이 낙관적 시나리오에서 5,000달러, 보수적 시나리오에서 3,200달러에 이를 것으로 전망하고 있습니다2427. 장기적으로는 2030년까지 평균 9,920달러에 도달할 수 있을 것으로 예상되며, 이는 기술적 발전과 기관 투자자들의 관심 증가에 기반한 전망입니다2824. 특히 이더리움 ETF의 승인과 함께 기관 투자자들의 관심이 증가하고 있어 중장기적 성장 잠재력이 높게 평가되고 있습니다2224.
최신 업그레이드와 미래 전망
펙트라(Pectra) 업그레이드
2025년 5월 이더리움은 덴쿤 이후 최대 규모인 펙트라 업그레이드를 완료했습니다2919. 이번 업그레이드는 11개의 EIP를 포함하여 검증자 스테이킹 한도를 32 ETH에서 2,048 ETH로 대폭 확대하고, 계정 추상화(Account Abstraction) 기능을 도입하여 사용자 경험을 크게 개선했습니다2926. 또한 데이터 처리량을 확대하고 수수료를 절감하여 네트워크의 전반적인 효율성을 향상시켰습니다1926.
2025년 주요 혁신 방향
2025년 이더리움 생태계는 네이티브 레이어 2 상호운용성 도입과 EIP-7702를 통한 사용자 경험 혁신에 집중할 예정입니다20. 특히 EIP-7702는 기존 EOA 지갑을 스마트 계정으로 변환할 수 있게 하여 가스 수수료를 USDC 등 스테이블코인으로 지불할 수 있게 하고, 트랜잭션 일괄 처리와 멀티팩터 인증 등 향상된 기능을 제공할 것입니다20.
샤딩과 장기 로드맵
이더리움의 장기적 확장성 해결책인 샤딩 기술은 네트워크를 여러 개의 샤드로 분할하여 병렬 처리를 가능하게 하는 핵심 기술입니다30. 샤딩이 완전히 구현되면 이더리움은 현재 초당 15건에서 최대 100,000 TPS까지 처리할 수 있는 진정한 월드 컴퓨터가 될 것으로 기대됩니다1130.
비트코인과의 비교
이더리움과 비트코인은 서로 다른 목적과 기능을 가진 블록체인 플랫폼입니다3132. 비트코인이 주로 가치 저장 수단과 디지털 금의 역할에 집중하는 반면, 이더리움은 스마트 계약과 탈중앙화 애플리케이션을 위한 플랫폼으로 설계되어 더 다양한 활용도를 제공합니다313.
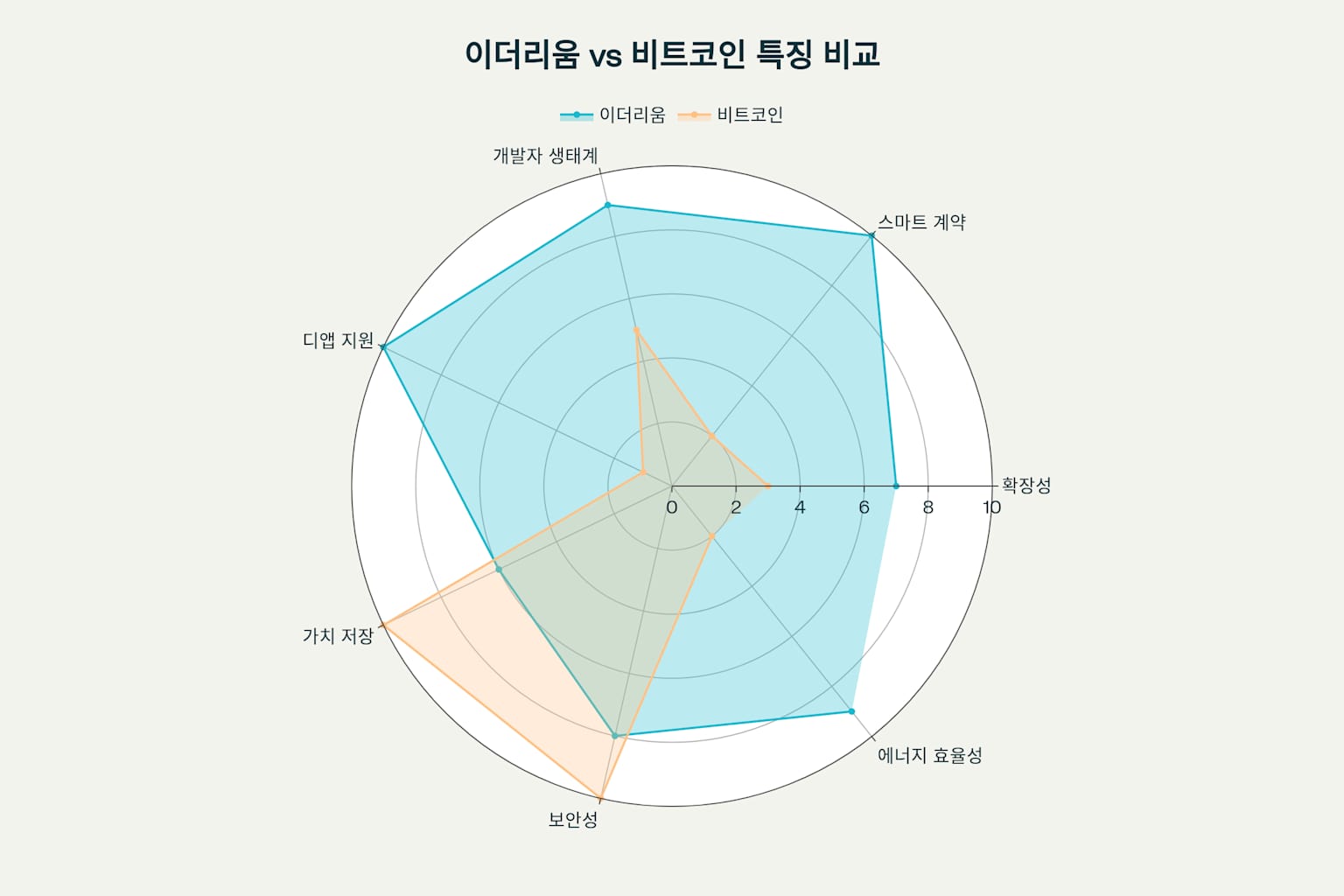
이더리움과 비트코인의 주요 특징별 성능 비교 레이더 차트
기술적 측면에서 이더리움은 스마트 계약과 개발자 생태계에서 압도적 우위를 보이며, 에너지 효율성 면에서도 PoS 전환 이후 비트코인보다 99% 적은 에너지를 소비합니다1112. 반면 비트코인은 가치 저장과 보안성 측면에서 여전히 우위를 유지하고 있어, 두 플랫폼은 상호 보완적인 관계를 형성하고 있습니다3132.
도전과 한계
경쟁 심화와 시장 점유율 하락
이더리움은 솔라나, 수이 등 고성능 경쟁 블록체인들의 등장으로 인해 점유율 하락과 개발자 이탈이라는 도전에 직면해 있습니다2533. JP모건의 분석에 따르면, 이더리움의 성과가 저조한 이유는 경쟁 블록체인과의 치열한 경쟁과 비트코인 대비 가치 저장 수단으로서의 약한 내러티브 때문입니다25.

Vitalik Buterin, co-founder of Ethereum, featured on the cover of Time magazine eyesmag
기술적 복잡성과 사용자 경험
이더리움의 높은 기술적 복잡성은 일반 사용자들에게 진입 장벽이 되고 있으며, 가스 수수료의 변동성과 네트워크 혼잡 문제는 여전히 해결해야 할 과제입니다3418. 또한 스마트 계약의 버그나 보안 취약점은 대규모 자금 손실로 이어질 수 있어 지속적인 보안 강화가 필요합니다1534.
리더십과 거버넌스 이슈
최근 이더리움 재단의 조직 개편과 함께 커뮤니티에서는 더 강력한 리더십과 명확한 비전 제시가 필요하다는 목소리가 나오고 있습니다3335. 특히 레이어 2 전략이 보안 리스크와 네트워크 단절 문제를 초래할 수 있다는 우려가 제기되면서, 이더리움의 전략적 방향성에 대한 논의가 활발해지고 있습니다3335.
결론
이더리움은 2015년 출시 이후 블록체인 기술의 패러다임을 바꾼 혁신적인 플랫폼으로, 스마트 계약과 탈중앙화 애플리케이션의 기반을 제공하며 디지털 경제의 새로운 가능성을 열어왔습니다23. DeFi, NFT, 게임 등 다양한 분야에서 활용되며 전 세계 개발자들의 혁신 플랫폼 역할을 하고 있으며, 지속적인 기술 업그레이드를 통해 확장성과 사용성을 개선해 나가고 있습니다2029.
그러나 경쟁 심화, 기술적 복잡성, 거버넌스 이슈 등의 도전에 직면하여 새로운 전환점을 맞고 있습니다2533. 2025년 펙트라 업그레이드와 향후 샤딩 구현을 통해 이러한 한계를 극복하고 진정한 ‘월드 컴퓨터’로서의 비전을 실현할 수 있을지가 이더리움의 미래를 결정하는 핵심 요소가 될 것입니다3029. 장기적으로는 기술적 우위와 생태계의 성숙도를 바탕으로 블록체인 혁명의 중심축 역할을 계속 수행할 것으로 전망되며, 투자자와 개발자 모두에게 지속적인 관심과 참여가 필요한 플랫폼입니다2428.
- https://aws.amazon.com/ko/web3/what-is-ethereum/
- https://ko.wikipedia.org/wiki/%EC%9D%B4%EB%8D%94%EB%A6%AC%EC%9B%80
- https://kr.cointelegraph.com/learn/articles/what-is-ethereum-a-beginners-guide-to-eth-cryptocurrency
- https://academy.gopax.co.kr/ideoriumiran-mueosingayo-2/
- https://ko.wikipedia.org/wiki/%EB%B9%84%ED%83%88%EB%A6%AC%ED%81%AC_%EB%B6%80%ED%85%8C%EB%A6%B0
- https://store.kyobobook.co.kr/person/detail/2011095401
- https://gipiti.tistory.com/128
- https://store-kr.dcentwallet.com/blogs/post/%EC%9D%B4%EB%8D%94%EB%A6%AC%EC%9B%80%EC%9D%98-%EC%97%AD%EC%82%AC-%ED%83%84%EC%83%9D%EB%B6%80%ED%84%B0-%ED%98%84%EC%9E%AC%EA%B9%8C%EC%A7%80%EC%9D%98-%EC%A3%BC%EC%9A%94-%EC%82%AC%EA%B1%B4-%EC%B4%9D%EC%A0%95%EB%A6%AC
- https://blog.naver.com/wemademax/222627773726
- https://blog.naver.com/gojump0713/222658770811
- https://engineer-daddy.co.kr/entry/%EC%9D%B4%EB%8D%94%EB%A6%AC%EC%9B%80-20
- https://www.sotatek.com/kr/blogs-kr/what-is-the-ethereum-merge-get-ready-for-the-merge-right-now/
- https://brunch.co.kr/@@3XFk/71
- https://superrich10000.tistory.com/entry/%EC%9D%B4%EB%8D%94%EB%A6%AC%EC%9B%80Ethereum-%EA%B8%B0%EC%B4%88%EB%B6%80%ED%84%B0-%EC%8B%AC%ED%99%94%EA%B9%8C%EC%A7%80-%EC%95%8C%EC%95%84%EB%B3%B4%EA%B8%B0
- https://younghoon_moon.gitbooks.io/blockchain-and-business-model-revolution/be14-b85d-ccb4-c778-c758-ac1c-b150-acfc-c6d0-b9ac/12-c774-b354-b9ac-c6c0-acfc-c2a4-b9c8-d2b8-cee8-d2b8-b799-d2b8.html
- https://m.upbitcare.com/academy/research/168
- https://blog.naver.com/21cshock/222458133191
- https://cryptomus.com/ko/blog/why-are-eth-gas-fees-so-high
- https://www.hankyung.com/article/202505076999g
- https://www.coinreaders.com/142960
- https://blog.naver.com/ajjuguru/223159298167
- https://zdnet.co.kr/view/?no=20250509223550
- https://www.digitaltoday.co.kr/news/articleView.html?idxno=558087
- https://99bitcoins.com/kr/price-predictions/ethereum-price-prediction/
- https://www.digitaltoday.co.kr/news/articleView.html?idxno=552344
- https://www.mk.co.kr/news/stock/11310532
- https://cryptonews.com/kr/cryptocurrency/ethereum-price-prediction/
- https://seo.goover.ai/report/202503/go-public-report-ko-872beb12-2fe2-4e0b-8abe-d179956a0f4a-0-0.html
- https://www.blockmedia.co.kr/archives/860780
- https://xangle.io/research/detail/489
- https://www.g-enews.com/article/Securities/2024/12/202412230625372910e250e8e188_1
- https://www.atfx.com/ko/analysis/trading-strategies/will-ethereum-ever-overtake-bitcoin-in-value
- https://www.digitaltoday.co.kr/news/articleView.html?idxno=566657
- https://stormy83.tistory.com/15
- https://news.nate.com/view/20250517n07643
- https://99bitcoins.com/kr/analysis/what-is-ethereum/
- https://www.investopedia.com/terms/e/ethereum.asp
- https://products.containerize.com/ko/blockchain-platforms/ethereum/
- https://b2broker.com/ko/news/the-road-to-london-next-step-towards-ethereum-2-0-to-take-place-in-august/
- https://brunch.co.kr/@bumgeunsong/47
- https://brunch.co.kr/@@7NNN/21
- https://www.etri.re.kr/webzine/20170811/sub04.html
- https://all-thereview.tistory.com/entry/%EC%95%94%ED%98%B8%ED%99%94%ED%8F%90%EB%8A%94-%EB%8C%80%EC%B2%B4-%EC%99%9C-%EC%98%A4%EB%A5%BC%EA%B9%8C-%EC%9D%B4%EB%8D%94%EB%A6%AC%EC%9B%80%EC%97%AD%EC%82%AC%EC%A0%81-%EB%B0%B0%EA%B2%BD-%EA%B8%B0%EC%88%A0%EC%A0%81-%ED%8A%B9%EC%A7%95
- https://www.coingecko.com/ko/categories/ethereum-ecosystem
- https://coinmarketcap.com/ko/view/ethereum-ecosystem/
- https://github.com/Consensys/ethereum-developer-tools-list/blob/master/EcosystemResources_Korean.md
- https://www.smarttoday.co.kr/news/articleView.html?idxno=82972
- https://cryptomus.com/ko/blog/ethereum-price-prediction-can-eth-reach-10000
- https://wonforecast.com/%EC%9D%B4%EB%8D%94%EB%A6%AC%EC%9B%80-%EC%A0%84%EB%A7%9D-2018-2019-2020-2025
- https://www.digitaltoday.co.kr/news/articleView.html?idxno=557550
- https://www.samsungsds.com/kr/insights/finance_series_ethereum.html
- https://jinsu-dori.co.kr/%EC%9D%B4%EB%8D%94%EB%A6%AC%EC%9B%80/
- https://www.digitaltoday.co.kr/news/articleView.html?idxno=564916
- https://brunch.co.kr/@mentats1/731
- https://www.digitaltoday.co.kr/news/articleView.html?idxno=565343